计算机组成原理-高速缓冲存储器
Cache的基本原理
目前Cache被集成在CPU内部,且用SRAM实现,速度快,成本高
当cache要运行时,会将主存的存储空间进行“分块”,cache与主存之间的数据交换以cache块为单位。
例:设每1KB为一块,主存共4MB,cache为8KB,主存与cache间以“块”为单位进行数据交换。
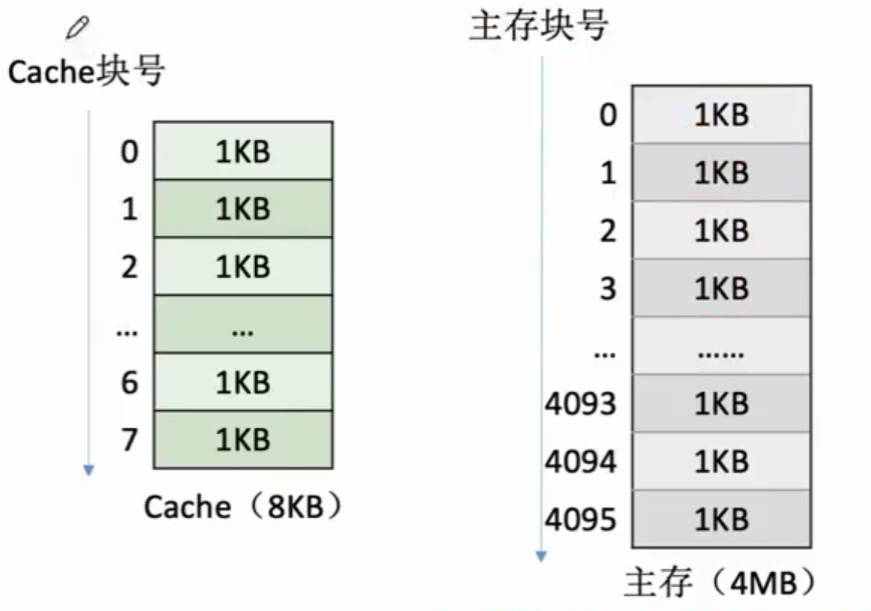
4MB=$2^{22}bit$,1K=$2^{10}$,因此主存可以被分为$2^{12}=4096$块,cache分为8块。
然后因主存的地址共22位,所以可以将12位用来表示块号,剩下10位表示块内地址。
局部性原理
- 空间局部性:在最近的未来要用到的信息(指令和数据),很可能与现在正在使用的信息在存储空间上是邻近的
- 时间局部性:在最近的未来要用到的信息,很可能是现在正在使用的信息(指一段代码可能在邻近时间很快再被调用)。
Cache就是用局部性原理,把程序中正在使用的部分数据存在cache中,使CPU的访存操作大多数针对cache进行,从而提高程序的执行速度。
例:
//程序A:按行访问
int sumarrayrows(int a[M][N])
{
int i, j, sum = 0;
for( i = 0; i < M; i++){
for( j=0; j<N; j++){
sum += a[i][j];
}
}
}//程序B:按列访问
int sumarrayrows(int a[M][N])
{
int i, j, sum = 0;
for( j = 0; j < N; j++){
for( i=0; i<M; i++){
sum += a[i][j];
}
}
}由于数组是按行进行存放在内存中,因此按行访问会有空间连接性,程序A的空间局部性会比程序B的空间局部性更好。cache执行程序A会更快。
性能分析
在之前要先了解一些概念,
命中率H:CPU欲访问的信息已在Cache中的比率。
缺失(未命中)率: M = 1 - H。
设一个程序执行期间,cache的总命中次数位$N_c$,访问主存的总次数为$N_m$,则命中H:
$$
H=N_c/(N_c+N_m)
$$
设$t_c$为访问一次cache所需时间,$t_m$为访问一次主存所需时间。则cache主存系统的平均访问时间t(以先访问cache,若cache未命中再访问主存)为:
$$
t=Ht_c+(1-H)(t_c+t_m)
$$
若同时访问cache和主存,若cache命中则立即停止访问主存,平均访问时间t:
$$
t=Ht_c+(1-H)t_m
$$
cache和主存的映射方式
cache行中的信息是主存中某个块的副本,地址映射就是指把主存地址空间映射到cache地址空间。并且cache中每块要加一个标记,指明它是主存中的哪一块副本。为了说明cache行中的信息是否有效,每个cache行需要一个有效位。
地址映射的方法有三种:
全相连映射
主存的每一块可以装入cache中的任何位置,每行的标记用于指出该行取自主存的哪一块,所以CPU访存时需要与所有cache行的标记进行比较。
优点是比较灵活,cache块的冲突概率低,空间利用率搞,命中率也高;
缺点是标记的比较速度较慢,实现成本较高,通常需要采用昂贵的按内容寻址的相联存储器进行地址映射。
例:
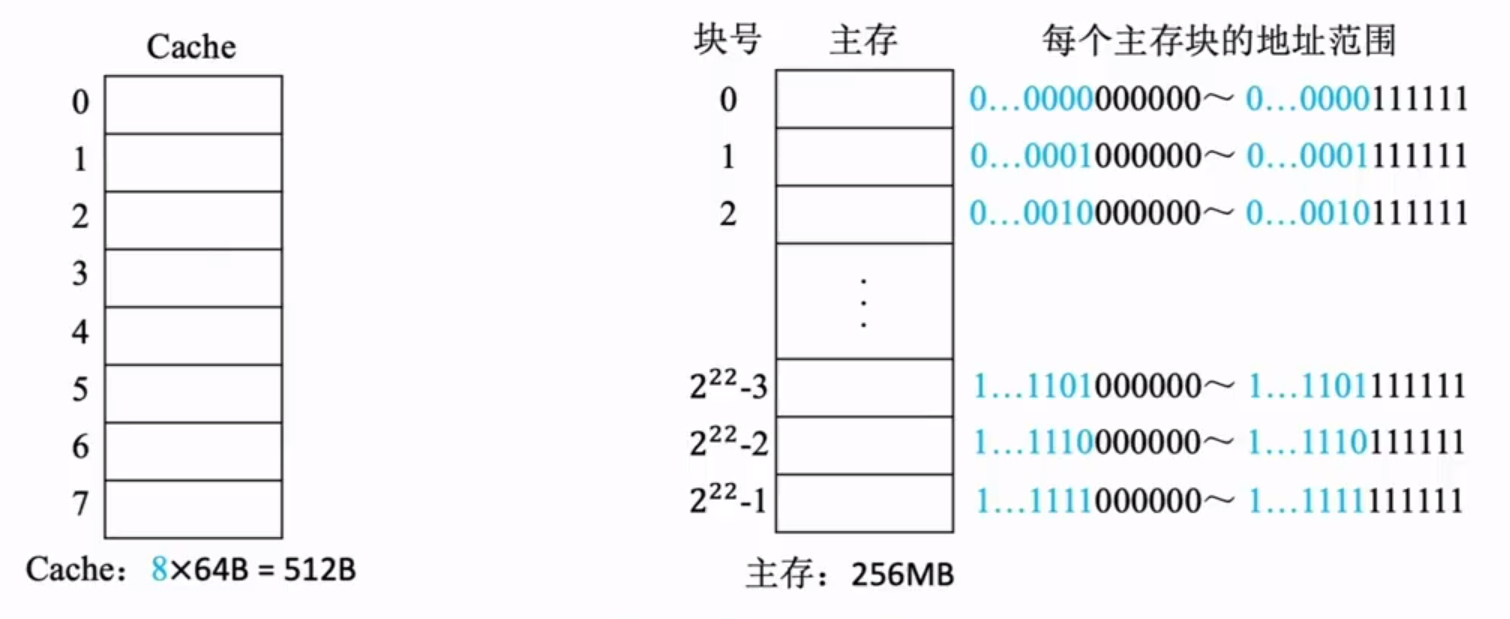
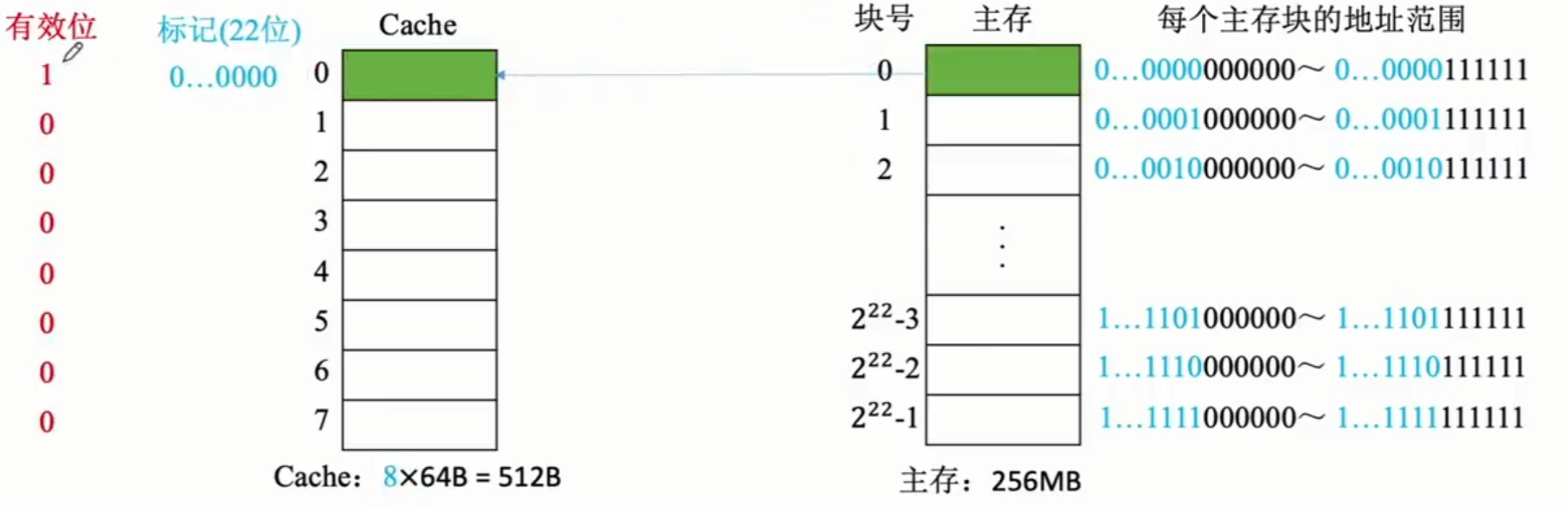
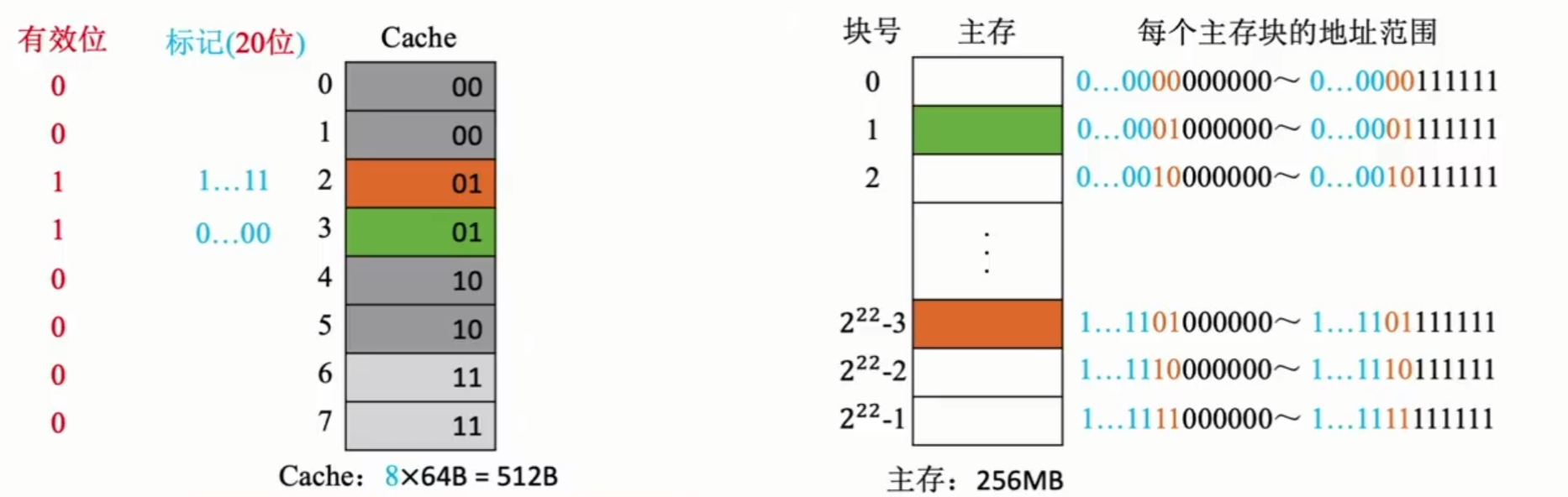
假设某个计算机的主存地址空间大小为256MB,按字节编址,其数据cache有8个cache行(即cache块,与主存块的大小相等),行长为64B。
主存256MB=$2^{28}$bit,主存的地址共28位,由于块大小为64B=$2^6$, 所以主存块内地址为6位,主存块号22位。
使用全相联映射,先初始所有有效位为0,主存的块可以放到cache中的任意位置。假设将主存块号0放到cache3中,此时会将有效位置为1,并标记上当前主存的主存块号。
同样若将$2^{22}-3$的主存块放入到cache1中,标记会变为$2^{22}-3$的主存块号。如下图所示。
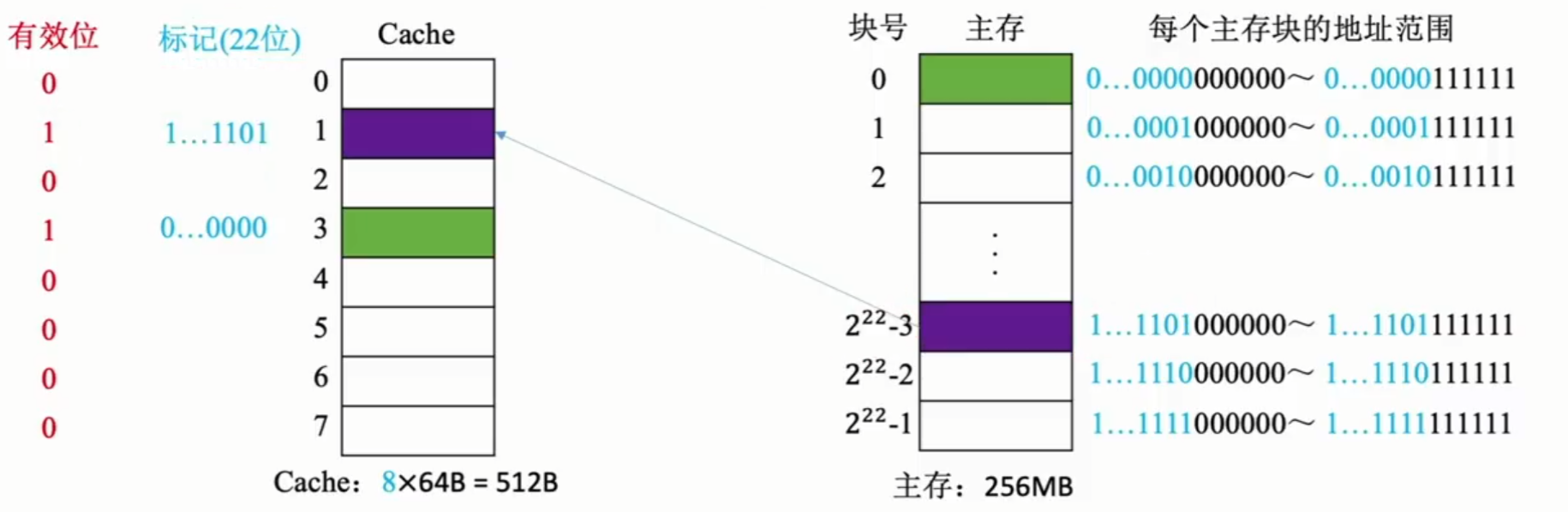
当使用“全相联映射”进行访问主存地址$1…1101 \quad 001110$时,会根据主存地址的前22位对比cache 中所有块的标记;
若标记匹配且有效位=1,则cache 命中,访问cache块内地址为001110的单元。
若未命中或有效位=0,则正常访问主存。
直接映射(只能放固定位置)
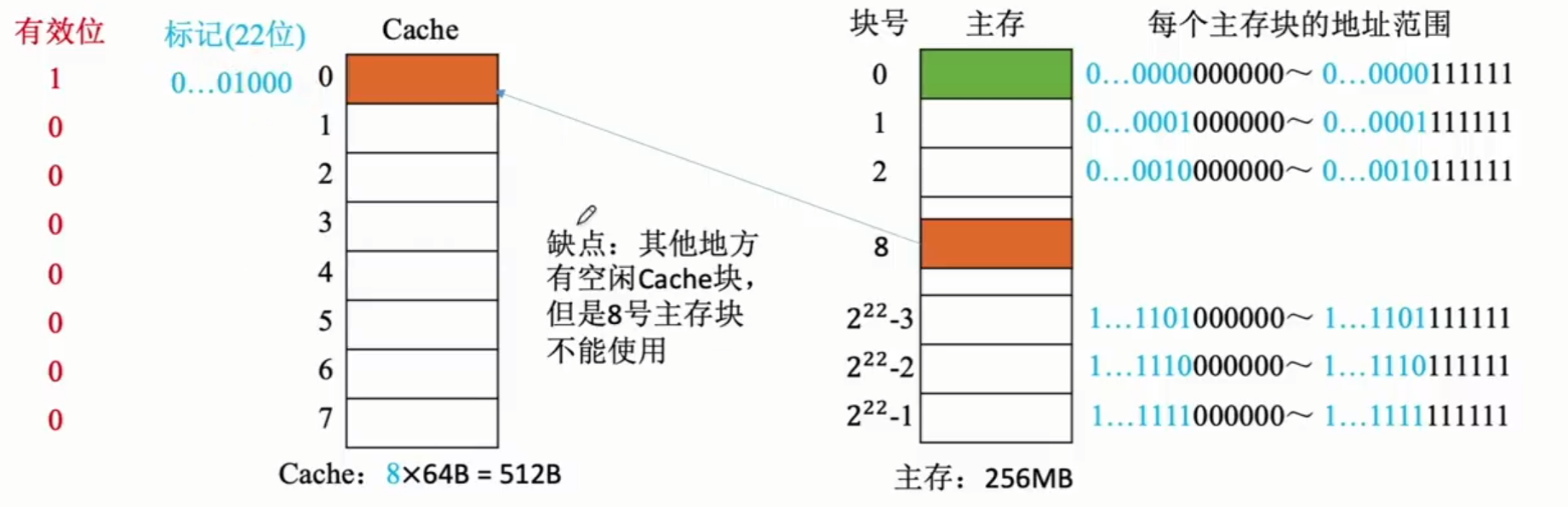
主存中的每一块只能装入cache中的唯一位置。若这个位置已有内容,则产生块冲突,原来的块将无条件被替换出去(无需使用替换算法)。直接映射实现简单,但不够灵活,即使cache的其他许多地址空着也不能占用,空间利用率低。
直接映射的关系可定义为:
$$
cache行号=主存块号 % cache总行数
$$
例:
假设某个计算机的主存地址空间大小为256MB,按字节编址,其数据cache有8个cache行(即cache块,与主存块的大小相等),行长为64B。
主存256MB=$2^{28}$bit,主存的地址共28位,由于块大小为64B=$2^6$, 所以主存块内地址为6位,主存块号22位。
若将0块号主存放入到cache中,此时0%8=0,所以会放到cache0中。
若想再将8块号主存放到cache中,由于8%8=0,所以会直接覆盖原先cache存放的信息。
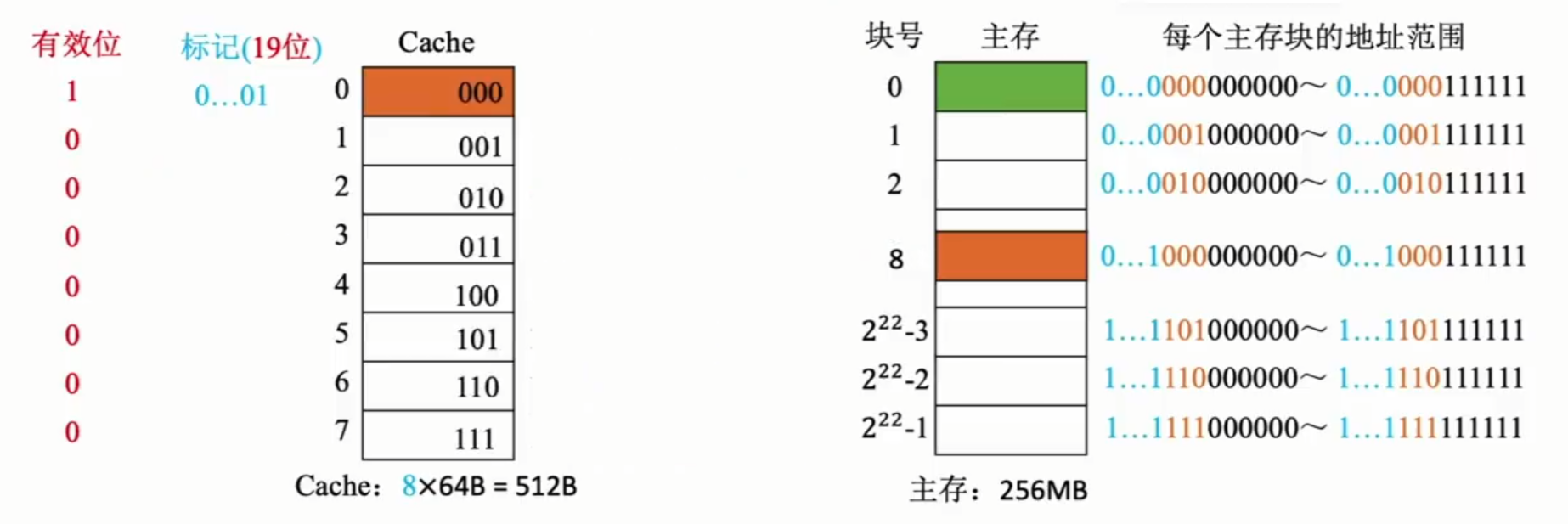
使用直接直接映射由于是对cache总行数取模,因此可以只取$\log_2总行数$来得到应映射到cache哪一行,该例题中$log_28=3$,因此只需19位标记即可,3位作于cache的行号,就可以直接根据主存块地址的后三位来确定应该放在cache的哪一行。
组相联映射(可放到特定分组)
将cache分成Q个大小相等的组,每个主存块可以装入固定组中的任意一行,即组间采用直接映射、组内采用全相联映射的方式。
组相联映射的关系可以定义为:
$$
cache组号=主存块号 % cache组数(Q)
$$
例:
假设某个计算机的主存地址空间大小为256MB,按字节编址,其数据cache有8个cache行(即cache块,与主存块的大小相等),行长为64B,采用二路组相联映射(2块为一组,分四组)。
主存256MB=$2^{28}$bit,主存的地址共28位,由于块大小为64B=$2^6$, 所以主存块内地址为6位,主存块号22位。
若想将块号1主存放入cache中,此时分组数=4,1%4=1,所以会放入到第1组中任意位置。
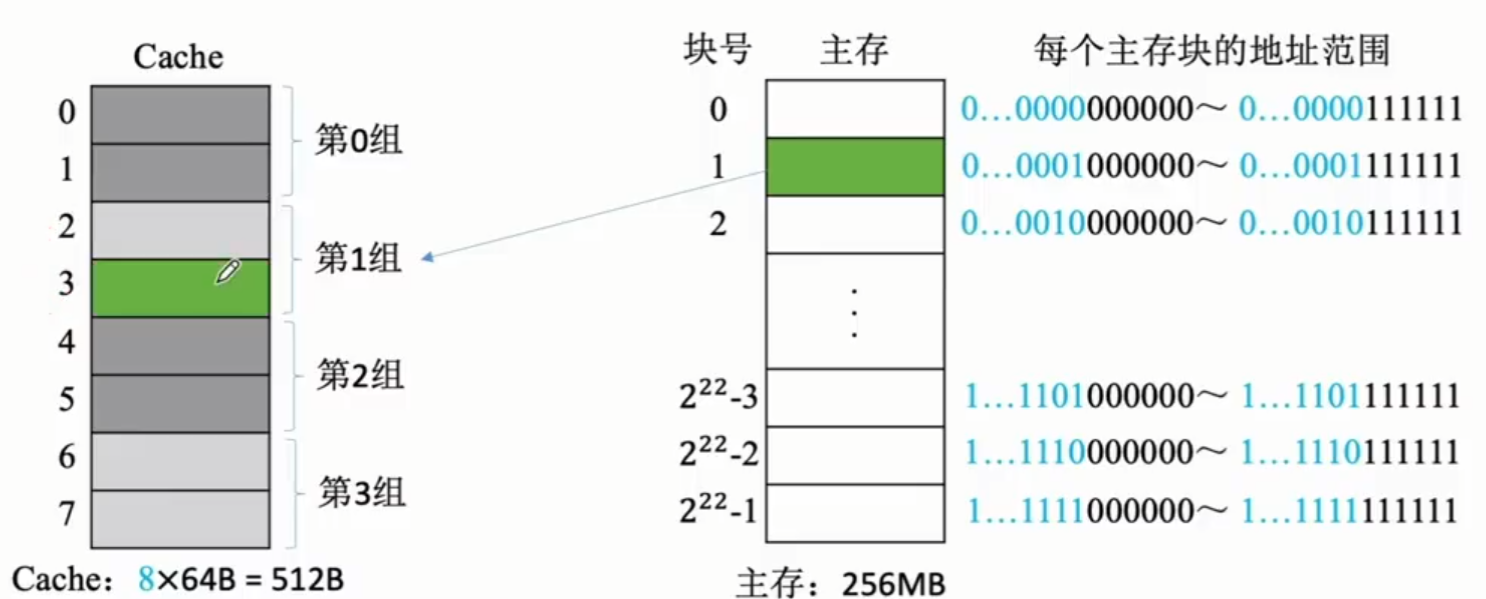
同样的,和直接映射类似,可以通过$\log_2分组数$来直接判断应该留几位作为判断放入cache的哪一个分组。在这例子中$\log_24=2$,2位作为cache行号,剩下20位作为标记位。
Cache中主存块的替换算法
在采用全相联映射或组相联映射方式时,从主存向cache传送一个新块,当cache或cache组中的空间已被占满时,就需要使用替换算法置换cache行。
随机算法(RAND)
若cache已满,则随机选择一块替换。
例:
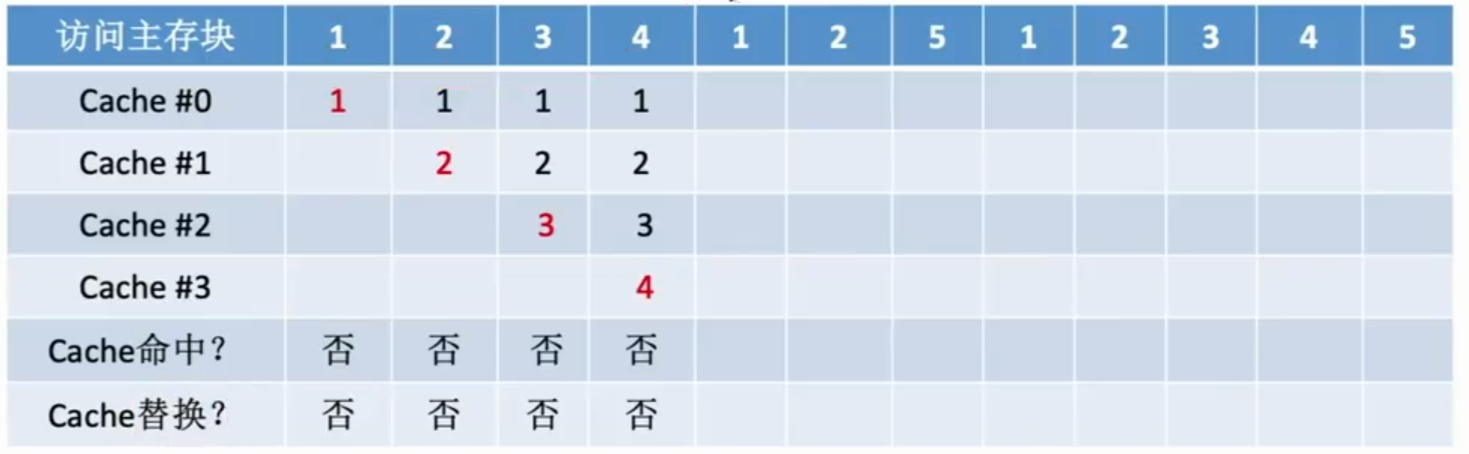
设总共有4个cache块,初始整个cache为空。采用全相联映射,依次访问主存块 {1,2,3,4,1,2,5,1,2,3,4,5}
由题第一次调用1,2,3,4会依次将主存块放入cache中,此时cache都未命中(因为原先cache中没有内容)。
再进行访问 1,2,此时cache中有1,2,就算命中,当访问5时,由于cache中没有5,根据随机算法cache会随机替换一个,假设这里随机替换了cache2中的3。
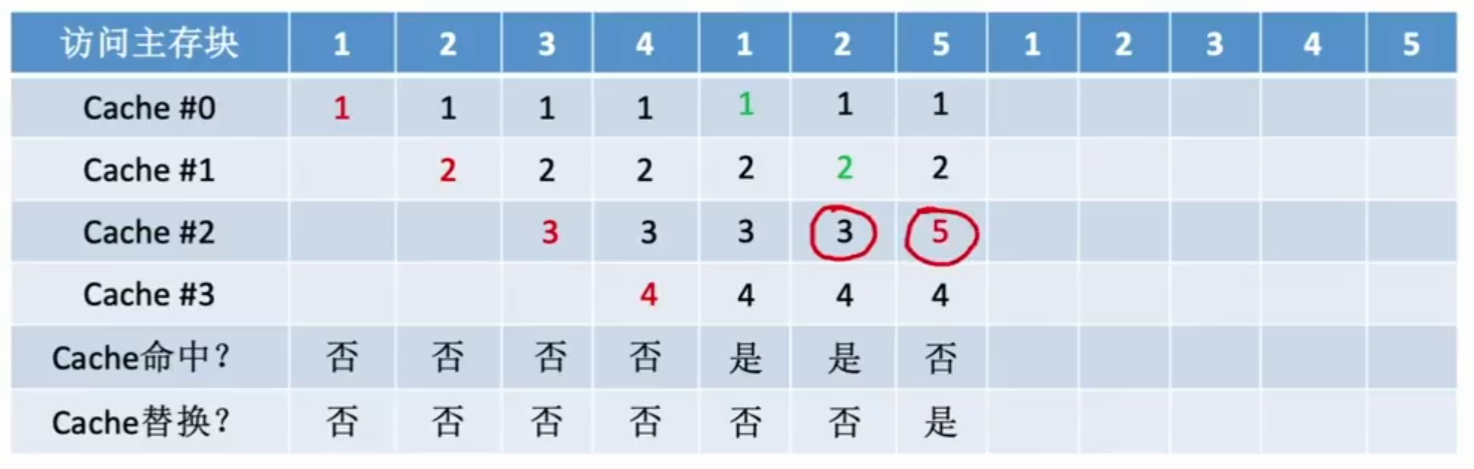
而后面的步骤就与前面几乎相同,若cache中有则命中,没有则进行替换。
随机算法实现简单,但没考虑局部性原理,实际效果很不稳定。
先进先出算法(FIFO)
选择最早调入的行进行替换。
例:
设总共有4个cache块,初始整个cache为空。采用全相联映射,依次访问主存块 {1,2,3,4,1,2,5,1,2,3,4,5}
前面与上个随机算法图相似,依次访问到5的时候,根据先进先出的原则,会将cache0块中的1替换为5.
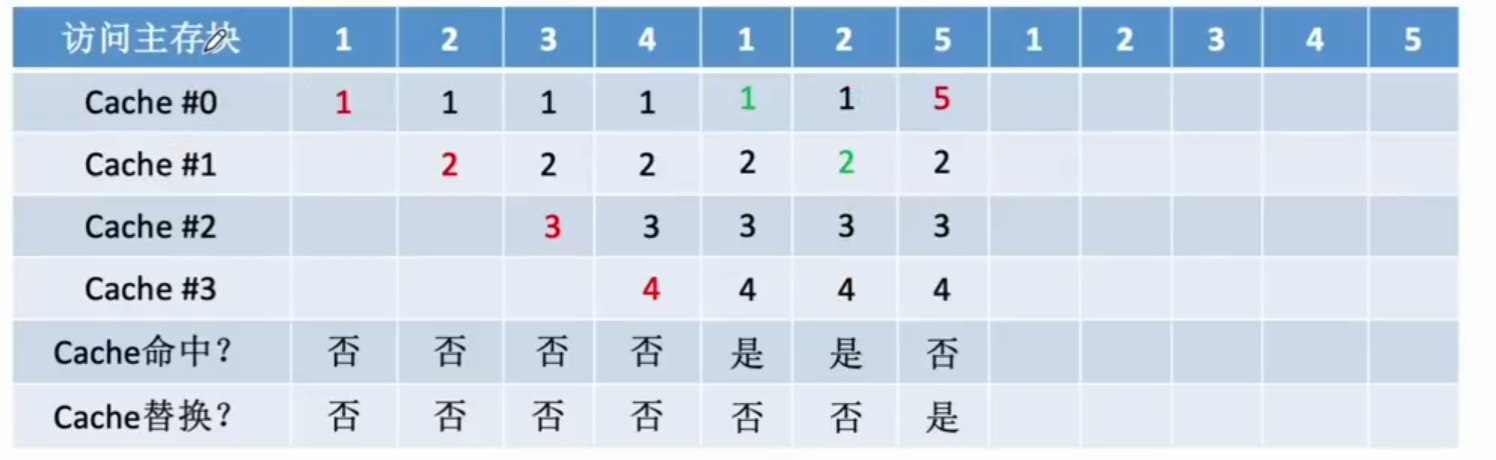
后面都是同样的步骤。
先进先出算法实现简单,也没考虑局部性原理,最先被调入cache的块也有可能是被频繁访问的,同时也会出现抖动现象(频繁的换入换出)。
近期最少使用算法(LRU)
依据程序访问的局部性原理,选择近期内长久未访问过cache行进行替换,是堆栈类算法。
LRU会为每一个cache块设置一个“计数器”,用于记录每个cache块有多久没被访问,当cache满后替换“计数器”最大的。
计数器的变化规则为:
- 命中时,所命中的行的计数器清零,比其低的计数器加1,其余不变。
- 未命中且还有空闲行时,新装入的行的计数器置0,其余全加1;
- 未命中且无空闲行时,计数器最大的行的信息块被淘汰,新装行的块的计数器置0,其余全加1。
例:
设总共有4个cache块,初始整个cache为空。采用全相联映射,依次访问主存块 {1,2,3,4,1,2,5,1,2,3,4,5}
前面与先前的算法都一样,依次访问到5的时候,由于此时cache已满,根据访问时间来看,3是最久没被访问的,所以会用5来替换3的位置,后面的处理方法类似。
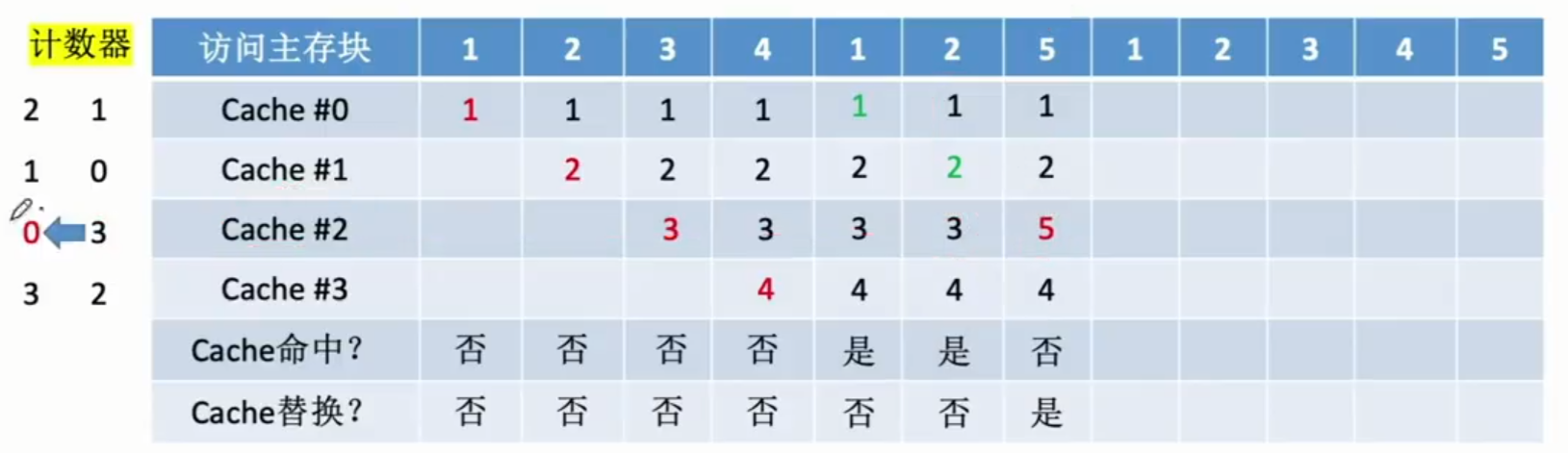
cache块的总数=$2^n$,则计数器只需n位。且cache装满后所有计数器的值一定不重复。
最不经常使用算法(LFU)
为每一个cache块设置一个“计数器”,用于记录每个cache块被访问过几次。当cache满后替换“计数器”最小的。
例:
设总共有4个cache块,初始整个cache为空。采用全相联映射,依次访问主存块 {1,2,3,4,1,2,5,1,2,3,4,5}
前面与先前的算法都一样,新调入的块计数器置0,之后每个被访问过后计数器都会加1,依次访问到5的时候,需要替换,会选择计数器最小的行(若有多个最小的行,可按行号递增或FIFO策略进行选择),此时5就会替换3的位置,后面的步骤就与前面一致。
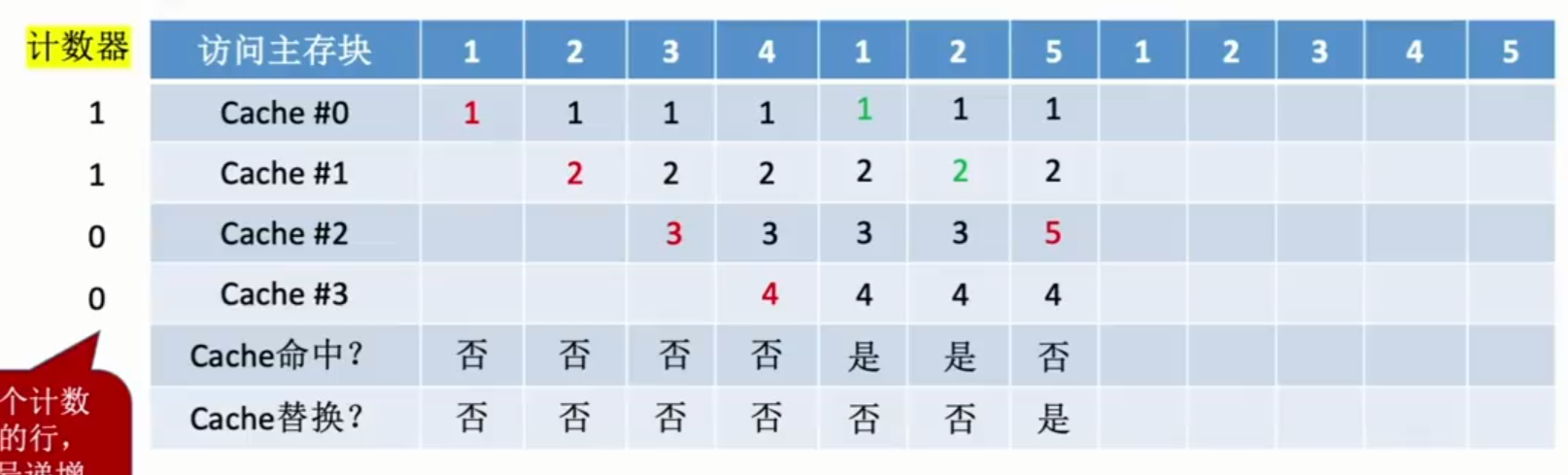
LFU算法,曾经被经常访问的主存块在未来不一定会用到,并没有很好的遵循局部性原理,实际运行效果不如LRU。
Cache写策略
因为cache中的内容是主存块副本,当对cache中的内容进行更新时,就需选用写操作策略使cache内容和主存内容保持一致。
写命中
对应cache写命中(write hit),有两种处理方法。
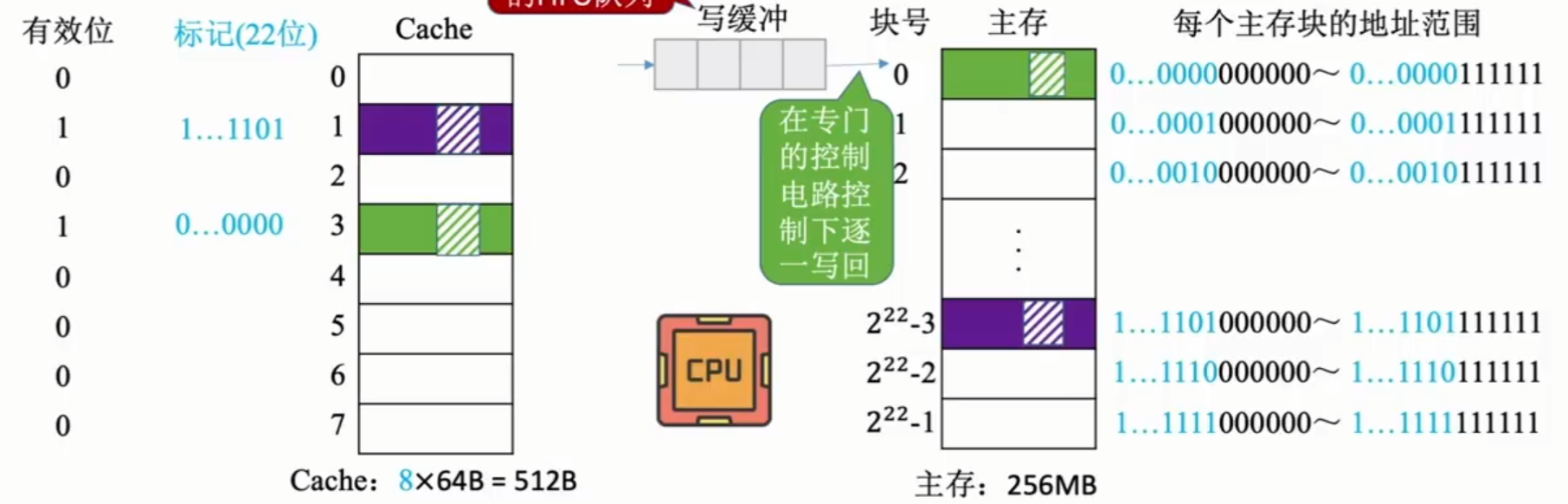
全写法(写直通法, write-through)
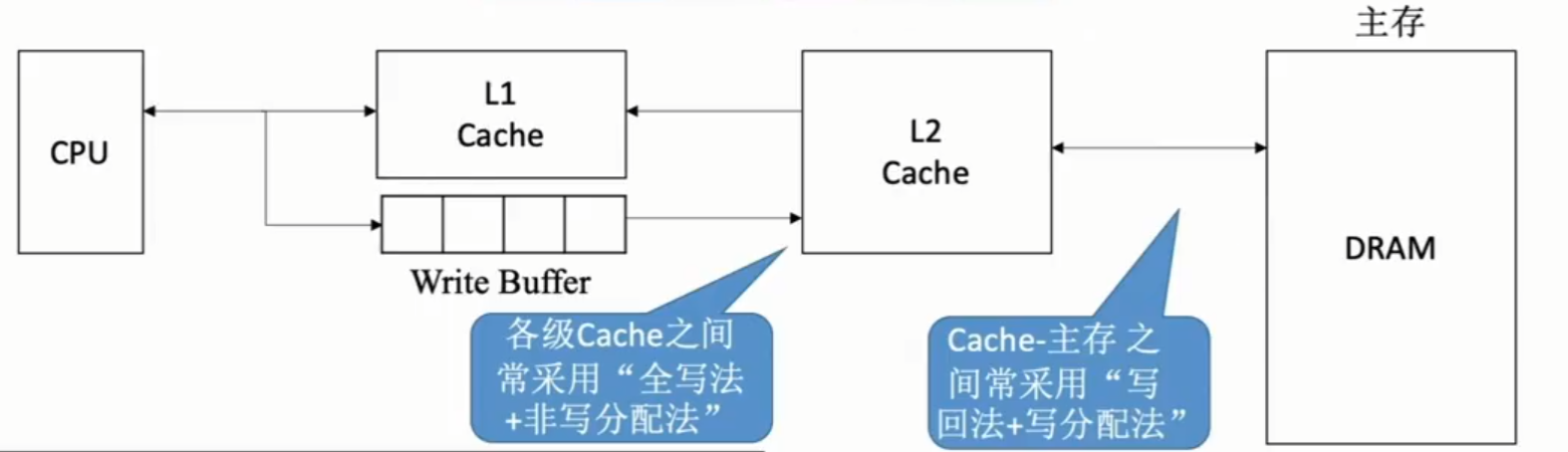
当CPU对cache写命中时,必须把数据同时写入cache和主存。这种方法实现简单,保证主存数据的正确性。缺点使增加访存次数,降低了cache 的效率。
使用全写法需要借助一个写缓冲(SRAM实现的FIFO队列):为减少全写法直接写入主存的时间损耗。
每当对cache块进行写入时,同样也会对写缓冲进行写入,然后会在专门的控制电路下逐一写回。
当出现频繁写时,会使写缓冲饱和溢出。
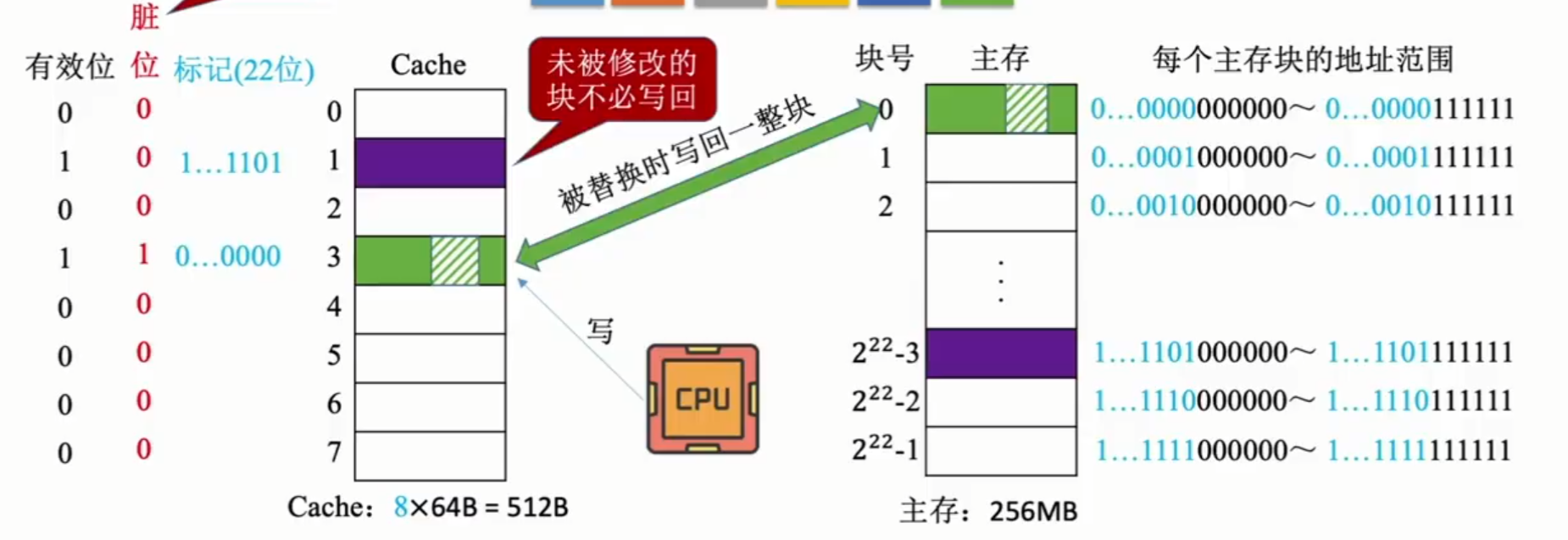
回写法(write-back)
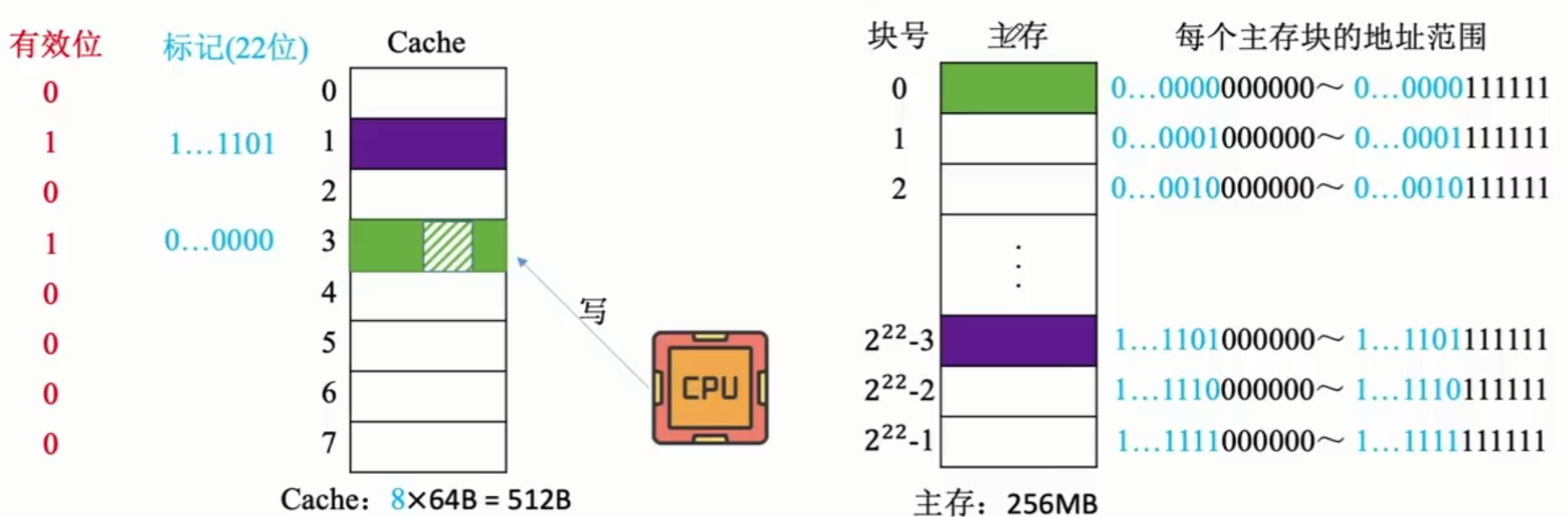
当CPU对cache写命中时,只把数据写入cache,而不立即写入内存,只有当此块被换出时才写回主存。
并且会给每个cache行设置一个修改位(脏位)。若修改位为1,则说明对应cache行中的块被修改过,替换时需写回主存;若=0,则说明未被修改。
如下图所示,cache3被修改过,仅当cache3被换出时候写回主存0块号。
写不命中
对于cache写不命中,也有两种处理方法。
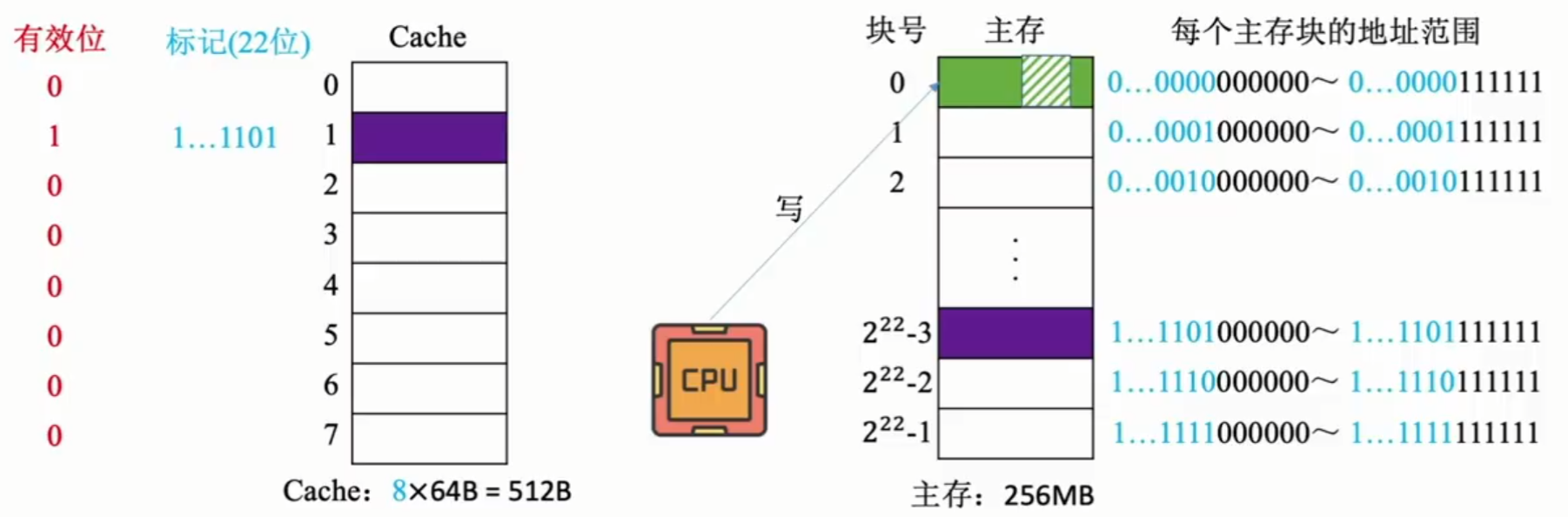
写分配法(write-allocate)
加载主存中的块到cahe中,然后更新这个cache块。
通常搭配写回法使用。
非写分配法(not-write-allocate)
只写入主存,不进行调块。 非写分配法通常搭配全写法使用。
现代计算机一般都会采用多级cache。